
DeepMap and Google recently partnered to upgrade the accuracy of their ETAs all around the globe. For almost 97% of the trips, Google Maps’ predictive ETAs have already been pretty accurate traffic-wise. However, with this partnership, the rest of the inaccuracies have additionally been reduced.
The inaccuracies in Google Maps can sometimes be minimized by more than 50% in places like Taichung. Furthermore, to do this at an international level, DeepMap used Graph Neural Networks. This is technically a generalized machine learning architecture.
Additionally, Graph Neural Networks helps DeepMap carry out spatiotemporal reasoning. Moreover, this can be done by integrating relational learning biases. It helps design the connectivity composition of real-life networks.
The world’s roads divided into Supersegments
The road networks were split up into “Supersegments”. These Supersegments comprise numerous adjoining segments of roads. Moreover, the roads which share a particular amount of traffic volume. Google Maps’ traffic prediction system presently comprises of the following elements:
- A route analyzer. This operates terabytes of traffic information which helps in the construction of Supersegments.
- A Novel Neural Network Model. This is enhanced by numerous goals. Furthermore, it anticipates the time of travel for every Supersegment.
Traffic Prediction in Google Maps through Machine Learning
Developing a machine learning system helps DeepMap forecast the travel time using Supersegments. However, architecture is the biggest challenge faced during this process. The question stands that how can one portray such complex sized examples of connected segments with random accuracy. Additionally, that too in a manner that a single model would accomplish success.

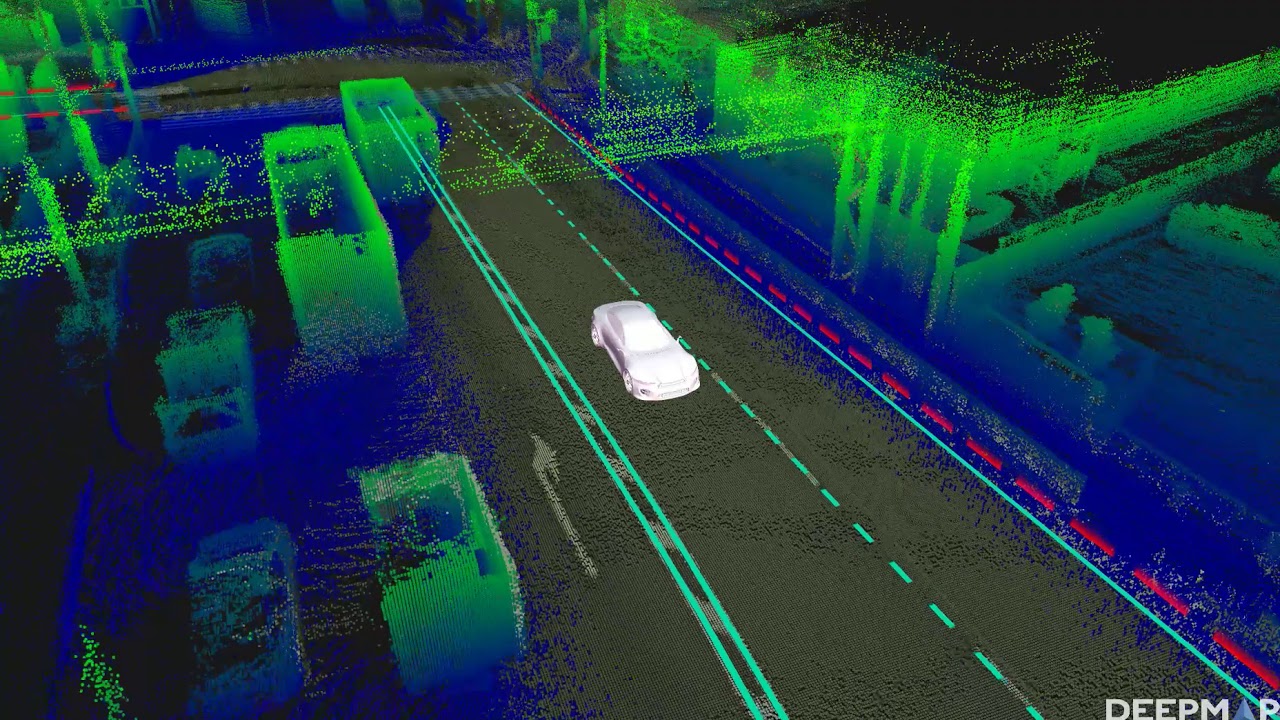
Source: FutureCar
The model uses the local road networks as if it were a graph. Each route segment correlates to a particular node or edge. These nodes exist between segments. The segments are successively placed on the same road. Furthermore, they can be joined through an intersection.
A message-passing algorithm is implemented in the Graph Neural Network. It is implemented where the messages and their reaction on an edge and node states are caught by neural networks. This automatically suggests that our Supersegments are road subgraphs. Moreover, these are exhibited at random in segments to traffic density. Hence, one can train a single model just by using these sampled subgraphs and can install them at scale.
Graph Neural Networks to improve Google Maps learning
Recently DeepMaps stumbled upon the fact that Graph Neural Networks are sensitive to alterations in the training syllabus. Invariability in the graph structures is the main reason for sensitivity and instability. A single batch of these graphs could accommodate from small two-node graphs to the large 100 plus nodes graphs.
To resolve this issue, DeepMaps came up with a solution after many experiments. The Novel Reinforcement Learning Technique.
MetaGradients was the most useful solution to this problem. It allowed the learning rate to automatically adjust during the training session. Moreover, this also helped the system pick up its own pace of the most favorable level rate schedule. This automatic learning during the training helped our model accomplish higher quality. Additionally, a reduction in the learning rate impulsively was also noted.
The results were much more stable post-implementation of MetaGradients. The unique architecture can be used in production too now because of stability in results.
Conclusion
Works are being done to explore whether the MetaGradient approach can help alter the structure of the multi-component loss-function. This could be done by decreasing travel approximated errors as a guiding measure. This work is being used as an inspiration from the MetaGradient approach.
Eventually, a successful launch was possible because of the final model and procedures. This led to an enhancement in the accuracy of ETAs on Google Maps and Good Map Platform APIs globally.